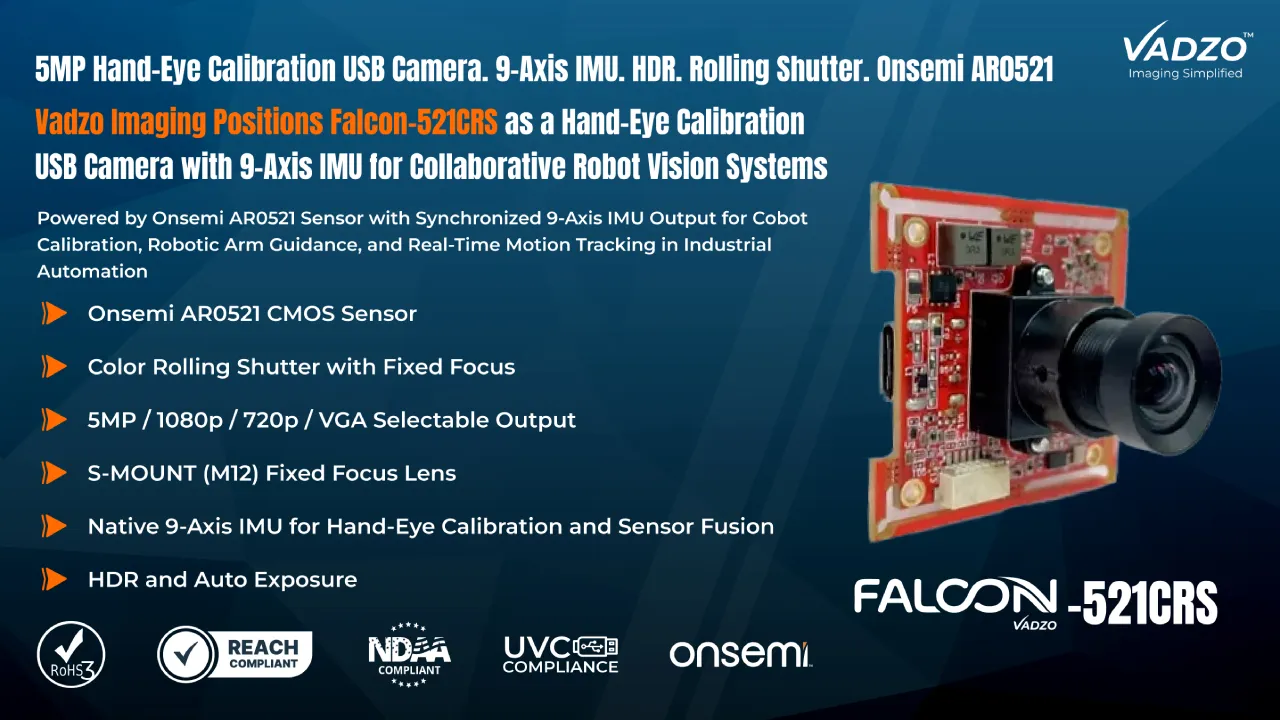
The Falcon-521CRS is a 5MP Color Rolling Shutter USB Camera built on the Onsemi AR0521 sensor. Positioned as a hand-eye calibration USB camera for collaborative robot vision systems, it integrates a native 9-axis IMU that delivers synchronized accelerometer, gyroscope, and magnetometer data with each image frame over USB 3.2 Gen1. It supports cobot end-effector mounting, robotic arm calibration workflows, real-time motion tracking, and embedded robotics vision deployment across Windows, Linux, and macOS in a compact S-Mount form factor.
FORT WORTH, TX / ACCESS Newswire / June 11, 2026 / Vadzo Imaging, a provider of embedded vision camera products, today positions the Falcon-521CRS Hand-Eye Calibration USB Camera as a purpose-built solution for collaborative robot vision systems requiring synchronized visual and inertial data at the cobot end-effector. Built on the Onsemi AR0521 sensor and part of Vadzo’s USB camera portfolio, the Falcon-521CRS delivers 5MP color imaging with a native 9-axis IMU that synchronizes accelerometer, gyroscope, and magnetometer readings with each image frame over a single USB 3.2 Gen1 connection. With this positioning, Vadzo Imaging addresses a specific integration challenge in collaborative automation deployments: achieving accurate, repeatable hand-eye calibration camera performance without the timing uncertainty and mechanical complexity introduced by separate IMU hardware. By integrating the IMU within the camera module and synchronizing both data streams at the sensor level, the Falcon-521CRS reduces calibration system complexity for cobot deployments and delivers the temporal precision required for accurate transformation matrix computation in collaborative robot camera system applications.
Hand-Eye Calibration as a System-Level Integration Challenge in Collaborative Robotics
Hand-eye calibration determines the rigid transformation matrix between a robot-mounted camera and the robot’s tool center point. In an eye-in-hand configuration – where the camera travels with the end-effector – this transformation defines how image-space coordinates map to robot-space coordinates. The accuracy of this transformation directly governs how precisely the robot can locate, approach, and manipulate target objects based on camera input.
In collaborative robot deployments, three engineering constraints compound the calibration problem. First, cobot end-effectors operate under strict payload limits – typically between 3 kg and 16 kg, depending on the platform – which limits the mass available for camera and IMU hardware at the tool center. Integrating separate camera and IMU boards, along with their respective connectors, cables, and mounting hardware, consumes payload mass that reduces the usable load capacity for grippers and tooling. A collaborative robot camera that consolidates imaging and inertial sensing into a single compact module directly addresses this constraint.
Second, separate IMU modules introduce a physical offset between the IMU reference frame and the camera optical center. This offset must itself be calibrated before the standard hand-eye calibration procedure, adding a calibration-within-calibration step that requires additional tooling and increases setup time. An IMU integrated USB camera, where the IMU and image sensor share a defined spatial relationship within the module, eliminates this intermediate calibration step from the system design.
Third, separate camera and IMU data paths produce streams with independent timestamps. Even with hardware to trigger synchronization, the jitter between the image acquisition signal and the IMU sample clock introduces per-frame timing uncertainty into the calibration dataset. For motion tracking IMU camera applications requiring accurate hand-eye calibration at sub-millimeter end-effector positioning accuracy, this timing uncertainty accumulates residual calibration error that limits achievable precision. The Falcon-521CRS resolves all three constraints by embedding a native 9-axis IMU within the camera module, synchronizing its output to image acquisition at the sensor level, and delivering both streams through a single USB 3.2 Gen1 connection.
The Onsemi AR0521 Sensor Architecture in Collaborative Robot Vision Contexts
The Onsemi AR0521 is a 5MP CMOS image sensor with a 2592 × 1944 active pixel array, a 1/2.5-inch optical format, and a 2.2 µm pixel pitch. The BSI architecture inverts the conventional pixel layer stack, placing the photodiode layer closer to the light path by routing metal interconnects behind the silicon layer. At a 2.2 µm pixel pitch – where front-side metal routing would occupy a significant fraction of the pixel aperture – the BSI architecture recovers fill factor and quantum efficiency that would otherwise be lost to metal shadowing. For robotic guidance system camera applications using calibration target imagery, this translates to improved signal quality at the sub-pixel localization level required for accurate checkerboard corner detection and ArUco marker pose estimation.
The AR0521 uses an electronic rolling shutter (ERS) readout, sequencing through the active pixel rows from top to bottom at a fixed row rate. At full 5MP resolution in 10-bit linear mode, the sensor supports 60 frames per second through a 4-lane MIPI CSI-2 output at up to 1.2 Gbps per lane. In the Falcon-521CRS, this data path is carried through the on-board ISP and USB bridge to the host over USB 3.2 Gen1. For hand-eye calibration camera workflows, the ERS behavior is well understood: during static calibration poses – where the cobot arm is held stationary at each target position – the rolling shutter produces zero row-to-row time offset effect, since all rows integrate and read out during the same stationary period. During live cobot operation, synchronized gyroscope data from the 9-axis IMU provides the angular velocity information that motion-aware vision algorithms require to apply rolling shutter correction, recovering accurate frame geometry from images captured during arm motion.
The sensor supports line-interleaved HDR through a T1/T2 dual-exposure readout scheme. In this mode, T1 (long exposure) and T2 (short exposure) rows are interleaved within the rolling shutter readout, and the downstream ISP combines them to produce a single output frame with dynamic range exceeding 96 dB. For cobot vision system camera deployments in mixed-lighting factory environments – where calibration targets near overhead lighting share the same frame with dark work surfaces – this HDR capability ensures that both bright and dark regions of the calibration scene are rendered with sufficient detail for reliable corner and edge detection. The AR0521 also integrates an on-chip temperature sensor accessible through the I2C register map, an on-chip PLL accepting external clock inputs from 10 to 48 MHz, and a built-in auto black level calibration circuit, all of which contribute to stable long-term operation in continuously running cobot vision systems.
Sensor and Camera Overview
The Falcon-521CRS is a 5MP Rolling Shutter color camera built on the Onsemi AR0521 sensor and coupled with a high-performance ISP and a native 9-axis IMU module. The camera module integrates the AR0521 sensor, ISP, fixed focus S-Mount lens assembly, and a 9-axis inertial measurement unit – delivering 3-axis accelerometer, 3-axis gyroscope, and 3-axis magnetometer data synchronized with each image frame over a single USB 3.2 Gen1 connection to the host. The USB 3.2 Gen1 interface carries both the image stream and synchronized IMU data to the cobot controller, eliminating the need for a separate IMU interface board or secondary communication channel at the end-effector. Output resolutions include full 5MP (2592 × 1944), 1080p, 720p, and VGA. The camera is UVC compliant and operates natively on Windows, Linux, and macOS without proprietary driver stacks.
The Falcon-521CRS camera module houses the AR0521 sensor with its BSI pixel array, a high-performance ISP that handles auto exposure, HDR compression, color correction, and lens shading correction, and a native 9-axis IMU whose output is synchronized to the image acquisition signal at the hardware level. The S-Mount (M12) lens holder accepts any standard M12 threaded optic, giving system integrators the flexibility to select focal length and field of view based on calibration board size and working distance. The camera ships with a factory-calibrated fixed focus lens and connects directly to any USB 3.2 Gen1 host port without drivers on Windows, Linux, and macOS.
Key specs: 5MP (2592 × 1944) | Onsemi AR0521 1/2.5-inch 2.2 µm BSI pixel | Color | Rolling Shutter | Fixed Focus | Auto Exposure & HDR | 9-Axis IMU | High-Performance ISP | USB 3.2 Gen1 | 5MP / 1080p / 720p / VGA | S-Mount (M12) | Windows / Linux / macOS | −30°C to +85°C operating temperature
5MP BSI Pixel Imaging for Calibration Target Feature Extraction
Hand-eye calibration routines – using checkerboard grids or structured marker patterns – rely on sub-pixel-accurate corner and edge detection across a range of cobot arm positions and orientations. The Onsemi AR0521 sensor captures a full 5MP (2592 × 1944) color frame using 2.2 µm BSI pixels that maximize photon collection and minimize optical crosstalk between adjacent pixels. This resolution and pixel signal quality allow calibration software to localize calibration target features with low positional uncertainty, reducing residual error in the computed transformation matrix. For a hand-eye calibration camera used in an eye-in-hand cobot configuration, a lower calibration residual error directly translates to improved TCP positioning accuracy during guided pick-and-place and inspection tasks. This advantage carries forward to every work cycle executed by the cobot after calibration, making initial calibration quality a permanent determinant of production accuracy.
Synchronized 9-Axis IMU for Accurate Hand-Eye Transform Computation
The defining engineering differentiator of the Falcon-521CRS in collaborative robot camera system deployments is the hardware-level synchronization between the native 9-axis IMU and the image acquisition signal. During a hand-eye calibration procedure, the calibration algorithm correlates each captured calibration image with the robot’s kinematic state now of image capture. With a separate external IMU, the timing between the camera trigger and the IMU sample introduces per-frame positional uncertainty into this correlation. With the Falcon-521CRS, IMU readings from the 3-axis accelerometer, 3-axis gyroscope, and 3-axis magnetometer are captured synchronously with each image frame and delivered over the same USB 3.2 Gen1 data pipe, eliminating per-frame timing uncertainty from the calibration dataset. For robotic arm calibration camera users, this synchronized data allows the calibration algorithm to correlate each captured image with the exact kinematic state of the cobot arm at that moment, improving the conditioning of the calibration system and the stability of the resulting transformation matrix.
During live cobot operation, the synchronized gyroscope data supports real-time rolling shutter correction, enabling accurate feature tracking and object localization from frames captured during arm motion. The synchronized accelerometer data further supports vibration characterization and motion-adaptive exposure control. This makes the Falcon-521CRS a synchronized IMU vision system that serves both the offline calibration phase and the online production phase from the same hardware module.
HDR and Auto Exposure for Consistent Target Visibility Across All Calibration Poses
Factory lighting conditions in cobot workspaces vary by zone, shift, and production configuration. A calibration procedure performed across fifteen or twenty cobot arm poses will traverse multiple lighting zones, and a camera without intelligent exposure control produces inconsistently exposed calibration images – some overexposed at poses near overhead lights, others underexposed at poses near dark base surfaces. The Falcon-521CRS integrates the AR0521 line-interleaved T1/T2 HDR scheme through a high-performance ISP, compressing wide-dynamic-range scenes into well-exposed output frames without ghosting or motion artifacts during static calibration poses. Auto exposure continuously adjusts gain and integration time between calibration poses, ensuring that calibration target features remain consistently visible at each position without manual exposure adjustment. For industrial USB vision system teams running calibration in real factory environments rather than controlled laboratory settings, this auto-exposure and HDR capability reduces calibration setup time and eliminates manual exposure tuning between poses.
Rolling Shutter Architecture in Static Calibration and Dynamic Operation Modes
The AR0521 operates in electronic rolling shutter mode, reading pixel rows sequentially from the top of the array to the bottom. In static calibration mode – where the cobot arm is held at a fixed pose for each image to capture – the rolling shutter introduces no geometric distortion, since all rows are captured during the same stationary period. The Falcon-521CRS 5MP Rolling Shutter camera delivers its highest calibration accuracy in this static mode. For live operation, where the cobot arm may be in motion during image capture, the 3-axis gyroscope data from the synchronized IMU provides the angular velocity measurements that motion-aware vision algorithms require to apply rolling shutter undistortion computationally. This two-mode architecture – static calibration with zero rolling shutter error, and dynamic operation with IMU-assisted correction – allows the Falcon-521CRS to serve both calibration and production phases without hardware changes.
Multi-Resolution Output for Calibration and Production Vision Pipelines
The Falcon-521CRS 5MP USB Camera supports selectable output resolutions. Full 5MP (2592 × 1944) mode delivers maximum spatial detail for calibration target feature detection during the offline calibration phase. The 1080p output mode balances resolution and USB bandwidth for real-time color vision processing during production operation. The 720p mode supports higher frame-rate operation on embedded cobot controllers with constrained processing budgets. VGA mode suits lightweight edge AI inference workloads where coarse object localization is sufficient. This multi-resolution flexibility allows a single embedded robotics vision camera module to serve both the calibration workflow and the live production vision pipeline without hardware swaps, reducing camera inventory and simplifying end-effector mechanical design.
USB 3.2 Gen1 Plug-and-Play Integration with Cobot Controllers
The Falcon-521CRS connects to any USB 3.2 Gen1 host port on Windows, Linux, and macOS. UVC class driver compliance means the camera is immediately recognized by the operating system without proprietary drivers, which simplifies integration with cobot controller platforms, including PC-based industrial computers, NVIDIA Jetson-based embedded AI systems, and ARM Linux single-board computers. For industrial robot calibration camera and collaborative robot camera deployments, this plug-and-play USB integration reduces the bring-up effort from days to hours. The IMU data stream is delivered over the same USB connection as the image stream, so the cobot controller receives synchronized visual and inertial data through a single cable without additional interface boards or secondary firmware paths.
Compact S-Mount Form Factor for Cobot End-Effector Mounting
The Falcon-521CRS is housed in a compact module with an S-Mount (M12) lens holder. For cobot end-effector mounting, where payload and volume constraints limit the size of ancillary hardware, the compact module geometry reduces the mechanical footprint and mass added to the tool flange assembly. The M12 lens mount accepts standard M12 threaded optics, allowing system integrators to select focal length and field of view based on the cobot’s specific working distance and calibration target size. Wide-angle M12 lenses provide broad calibration board coverage at close working distances, while longer focal-length lenses deliver higher angular resolution for precision measurement tasks. The same module serves both calibration and production operations without lens changes between phases.
“Hand-eye calibration accuracy is fundamentally limited by the quality of the spatial data recorded during each calibration pose. Most cobot vision system camera setups rely on a camera alongside a separately mounted IMU, which introduces frame-to-sensor timing uncertainty and adds mechanical complexity at the end-effector. The Falcon-521CRS delivers synchronized 5MP image data and 9-axis inertial data from a single compact module over USB 3.2 Gen1. For collaborative robot camera teams, this means the calibration algorithm receives consistent, temporally aligned data from the first capture rather than after rounds of synchronization tuning. That precision at the calibration stage carries directly into the positioning accuracy of the deployed cobot.” – Alwin Vincent, Product Manager, Vadzo Imaging
Applications
Collaborative Robot (Cobot) Hand-Eye Calibration
In eye-in-hand cobot configurations, the Falcon-521CRS hand-eye calibration camera mounts at the end-effector and captures calibration images of a fixed reference target across a range of cobot arm poses. The 5MP BSI pixel array delivers the spatial resolution required for accurate corner and edge detection on standard checkerboard and ChArUco calibration boards. The synchronized 9-axis IMU records per-frame kinematic data that supports calibration algorithms using combined visual and inertial residuals. Auto exposure and HDR maintain consistent calibration target visibility across all arm poses without manual tuning, and the USB 3.2 Gen1 interface delivers both data streams to the calibration workstation through a single cable. Calibration frameworks, including OpenCV, MATLAB Robot System Toolbox, and ROS2 hand-eye calibration libraries, integrate directly with the UVC-compliant image stream and the synchronized IMU output without additional interface software.
Robotic Arm Guidance and Pick-and-Place Vision Systems
For pick and place robot camera deployments on collaborative robot arms, the Falcon-521CRS provides 5MP color imaging for object localization, bin picking, and part orientation determination in the production phase following calibration. The synchronized gyroscope data support motion-aware feature tracking and rolling shutter correction during arm traversal, recovering accurate spatial measurements from frames captured while the arm moves toward the pick position. Auto exposure maintains image quality as the arm moves between lighting zones on the production floor, and the multi-resolution output modes allow the production vision pipeline to operate at a lower resolution and higher frame rate than the calibration pipeline from the same camera hardware without any mechanical changes to the end-effector assembly.
Edge Robotics and Synchronized IMU Vision Systems
For edge robotics vision camera and embedded robotics vision camera deployments running on ARM Linux-based cobot controllers, the Falcon-521CRS operates natively over USB 3.2 Gen1 without proprietary drivers. Standard ROS2 USB camera nodes access the image stream directly, and the synchronized IMU output supports visual-inertial odometry (VIO) pipelines on NVIDIA Jetson, Raspberry Pi, and similar embedded platforms. This makes the Falcon-521CRS a synchronized IMU vision system that integrates into ROS2-based navigation and manipulation stacks without custom firmware development, supporting both mobile base navigation and manipulator arm guidance in a unified hardware platform.
Industrial Robot Calibration and Quality Inspection
Beyond cobot applications, the Falcon-521CRS functions as an industrial robot calibration camera in eye-to-hand configuration for fixed-arm industrial robots. Mounted above the workspace on a stationary fixture, it provides 5MP color imaging for workspace calibration target capture across multiple robot TCP positions. The multi-resolution output modes enable the same camera module to switch from high-resolution calibration mode to lower-resolution, higher-frame-rate inline inspection mode during production cycles. HDR and auto exposure maintain consistent image quality under the mixed direct and reflected lighting conditions typical of industrial inspection stations without manual reconfiguration between calibration and inspection phases.
Frequently Asked Questions
1) How does hardware-level IMU synchronization inside a hand-eye calibration USB camera improve the accuracy of the computed transformation matrix compared to using a separate IMU module?
In a hand-eye calibration setup, the calibration algorithm computes the transformation between the camera optical frame and the robot’s tool center point by correlating a set of calibration images with the corresponding robot joint configurations, now each image was captured. When a separate IMU board is used alongside the camera, the IMU samples arrive on an independent timestamp domain governed by a different oscillator and firmware path, and the per-frame time offset between the image trigger and the nearest available IMU sample is rarely zero. This jitter accumulates across the calibration dataset as positional uncertainty in the per-pose correlation, weakening the conditioning of the calibration system and increasing residual error in the solved transformation matrix. A hand-eye calibration USB camera that synchronizes the IMU output to image acquisition at the hardware level eliminates this jitter entirely, because every frame is paired with an inertial sample captured at the identical acquisition instant rather than the nearest available polling cycle. Vadzo Imaging implements this IMU-to-frame synchronization inside the camera module itself, so the calibration algorithm receives temporally aligned visual and inertial data from the first session without requiring system integrators to develop synchronization firmware, measure inter-device timing offsets, or perform post-processing interpolation to align the two data streams. The result is a better-conditioned calibration dataset that produces a more geometrically stable transformation matrix, and that stability carries forward into every production work cycle the cobot executes after calibration is complete.
2) What distinguishes Vadzo Imaging’s approach to collaborative robot camera integration from standard USB camera solutions available in the market?
Standard USB cameras offered for robotics applications typically deliver image data alone, leaving the system integrator responsible for sourcing a separate IMU, designing the co-mounting geometry, characterizing the physical offset between the IMU reference frame and the camera optical center, writing firmware to align the two data streams in time, and qualifying the assembled two-board configuration for the cobot’s payload and environmental requirements. Each of these steps introduces a potential source of systematic error into the hand-eye calibration result and consumes engineering time that would otherwise be invested in the calibration algorithm, vision pipeline, and robot application logic. Vadzo Imaging builds collaborative robot camera system modules with the IMU integrated within the camera housing and synchronized to image acquisition at the sensor level, delivering a single-cable USB 3.2 Gen1 solution that outputs spatially and temporally co-registered image and inertial data without secondary hardware or synchronization software. The AR0521’s BSI pixel architecture contributes calibration-grade image quality even under variable factory lighting, and the compact S-Mount module geometry supports the tight mass and volume constraints of a cobot end-effector without requiring custom mechanical design. Beyond hardware, Vadzo’s engineering team actively supports customers through ROS2 integration, calibration framework setup, OEM customization, and volume production qualification – making Vadzo Imaging a long-term embedded vision technology partner for collaborative robot programs rather than a transactional component source for an evaluation purchase.
3) How does the AR0521 rolling shutter readout interact with the cobot arm motion during live operation, and how does synchronizing IMU data enable correction in a real-time motion tracking camera deployment?
An electronic rolling shutter sensor reads pixel rows sequentially from the top of the active array to the bottom, completing the full frame readout across a period that represents a fraction of the inter-frame interval. In a static scene, this introduces no image distortion because the subject geometry does not change between the first and last row captures. When the camera is mounted on a moving cobot end-effector, however, the camera position and orientation shift incrementally between the moment the first row is captured and the moment the last row is captured, causing each row to represent a slightly different camera pose. The resulting geometric skew makes spatial measurements extracted from in-motion frames less accurate unless a correction is applied. The synchronized 3-axis gyroscope output of a motion-sensing USB camera resolves this by supplying the angular velocity of the camera at sub-frame time resolution for every inter-row interval, which motion-aware vision algorithms use to compute and apply a row-by-row distortion transform that recovers the spatial geometry of an equivalent instantaneous capture. For hand-eye calibration procedures specifically, the cobot arm is held stationary at each defined pose before each image is captured, so rolling shutter introduces no geometric error during the calibration phase itself – the IMU-assisted rolling shutter correction is most operationally valuable during live production cycles, where the arm is in continuous motion between pick and place positions while the vision pipeline continues acquiring frames to track object positions and update grasp plans in real time. Vadzo Imaging provides technical documentation covering the relationship between the gyroscope sample rate, the AR0521 row readout period, and the rolling shutter correction model, supporting customers who build motion-compensated feature tracking algorithms above the camera layer.
4) How does the AR0521’s back-side illuminated pixel architecture contribute to sub-pixel calibration target detection accuracy in a robot calibration camera deployment under variable factory lighting?
Sub-pixel-accurate corner detection on checkerboard targets requires that the transition between adjacent light and dark squares of the calibration pattern is reproduced with high edge contrast and low photon-shot noise at the sensor level. In a front-side illuminated CMOS sensor, metal routing layers that carry bias and readout lines to each photodiode sit within the optical path above the silicon, reducing the effective light-collecting aperture of each pixel – an effect that becomes progressively more detrimental as pixel pitch decreases. At the AR0521’s 2.2 µm pixel pitch, this fill-factor penalty would meaningfully suppress quantum efficiency in a front-side architecture. The AR0521’s back-side illuminated construction addresses this by inverting the silicon layer stack during wafer processing: the metal interconnects are routed behind the substrate, placing the full pixel aperture directly in the light path and recovering the fill factor and quantum efficiency that front-side routing would otherwise shadow. For robotic arm calibration camera applications, the practical consequence is that calibration target edge transitions – the white-to-black boundaries whose sub-pixel position the calibration algorithm must localize with minimum uncertainty – are reproduced with measurably higher signal-to-noise ratio in the raw image data. Sub-pixel corner localization methods that operate on local intensity gradient fields are sensitive to this SNR: a noisier gradient field produces a less precisely localized corner estimate, and that localization uncertainty accumulates as residual calibration error across all the poses collected during a hand-eye calibration session. The AR0521’s BSI pixel delivers cleaner gradient data that reduces this residual error in real factory environments where lighting is variable and often non-ideal, not only under the controlled illumination of a calibration laboratory. Vadzo Imaging selects the AR0521 for cobot vision integration specifically because this pixel-level signal quality advantage is consistent across the operating conditions where production cobots are actually deployed.
Q: How does Vadzo Imaging support customers deploying a collaborative robot camera system from initial evaluation through volume production for an OEM cobot integration program?
Vadzo Imaging structures deployment support across three phases that correspond to the natural engineering progression of a collaborative robot vision program. At the evaluation stage, customers receive a complete kit – camera module, S-Mount fixed focus lens, USB 3.2 Gen1 cable, and driver documentation for Windows, Linux, and macOS – with no minimum order requirement, so engineering teams can validate imaging quality, IMU synchronization behavior, and USB host compatibility on their specific cobot controller hardware before committing to a production design. During the integration and qualification phase, Vadzo’s engineering team provides direct technical assistance that covers ROS2 USB camera node configuration, IMU data stream access and timestamp interpretation, integration guidance for common hand-eye calibration frameworks including OpenCV, MATLAB Robot System Toolbox, and ROS2 easy_handeye2, and M12 lens selection support for deployments where the standard working distance or angular field of view requires optical adjustment to match the target cobot workspace geometry. As programs advance to volume production, Vadzo coordinates manufacturing schedules aligned to customer ramp timelines, delivers full compliance documentation for RoHS 3, REACH, and NDAA requirements, and maintains component supply chain continuity for camera module constituents across production runs. Vadzo Imaging’s application engineering team remains engaged across the full program lifecycle – from first evaluation kit shipment through production qualification and post-launch support – which is a meaningful operational distinction for industrial robot calibration camera and cobot integration programs where calibration performance targets frequently tighten during system-level integration testing and camera module parameters may require tuning to achieve the end-effector positioning accuracy the final deployed system requires.
Availability
The Falcon-521CRS Hand-Eye Calibration USB Camera, built on the Onsemi AR0521 sensor, is now available for evaluation and production orders. Evaluation kits include the camera module, S-Mount fixed focus lens, USB 3.2 Gen1 cable, and platform driver documentation with no minimum order requirement. Browse the full Vadzo Imaging embedded vision camera portfolio at https://www.vadzoimaging.com/ or contact Vadzo Imaging at [email protected] to request an evaluation kit or discuss OEM integration requirements for collaborative robot vision systems and industrial robot calibration deployments.
About Vadzo Imaging
Vadzo Imaging is a global provider of embedded vision solutions and delivers high-performance camera technologies and imaging platforms for applications in robotics, industrial automation, UAVs, edge AI, and medical systems. Its products are designed for seamless integration with leading embedded platforms. Vadzo supports customers through hardware customization, firmware development, and module-level drivers, enabling faster development and deployment of vision-based systems.